Robots-fourmis
Alain Lenoir mis à jour 03-Nov-2025
La fourmi est particulièrement appréciée des chercheurs pour sa capacité à collaborer dans la réalisation d’une tâche. Elle inspire les travaux de robotique depuis le début de cette science. Ainsi, la fourmi du désert utilise la lumière polarisée pour revenir en ligne droite à son nid après avoir cherché de la nourriture selon une trajectoire sinueuse. On construit des robots selon ce principe (Jean-Arcady Meyer, "Travailler sur les robots permet de mieux comprendre les êtres vivants", Le Monde 16 mars 1999). Pour les nombreux travaux de robotique voir Passera & Wild (2016). Des robots danseurs avaient déjà été fabriqués pour communiquer avec les abeilles (Michelsen 1998). En intelligence artificielle on simule avec des algorithmes des fourmis à quatre pattes qui doivent avancer (Larousserie 2019). Des robots fourmis avancent en interaction avec des phéromones virtuelles. La stigmergie permet la coordination dans l'exploration collective (Hunt et al 2019). Dès les années 2000, Eric Bonabeau et Guy Théraulaz 2000a, 2000b) travaillent sur l'intelligence en essaim avec des robots.
Un
robot aide à révéler comment les fourmis transmettent les
connaissances,
10 août 2022. Temnothorax albipennis déménage selon
une course en tandem où la fourmi qui est devant apprend le tracé
à la suiveuse. Cela a été vérifié avec un
robot qui montre le chemin (Franks et al 2022). Voir Course
en tandem.
"Les chercheurs ont construit une grande arène afin qu’il
y ait une distance appréciable entre l’ancien nid de fourmis, volontairement
de mauvaise qualité, et un nouveau bien meilleur où les fourmis
pourraient être conduites par un robot. Un portique a été
placé au sommet de l’arène pour se déplacer d’avant
en arrière avec un petit robot coulissant attaché à celui-ci,
afin que les scientifiques puissent diriger le robot pour qu’il se déplace
le long de routes droites ou ondulées. Des glandes olfactives attrayantes,
provenant d’une fourmi ouvrière, ont été attachées
au robot pour lui donner les phéromones d’une fourmi enseignante.
Le professeur
Franks a expliqué : « Nous avons attendu qu’une fourmi quitte
l’ancien nid et avons placé la broche du robot, ornée de
phéromones attrayantes, directement devant elle. La tête d’épingle
a été programmée pour se déplacer vers le nouveau
nid soit sur un chemin droit, soit sur un magnifique Nous avons dû permettre
au robot d’être interrompu dans son voyage, par nous, afin que nous
puissions attendre que la fourmi suivante nous rattrape après qu’elle
ait regardé autour d’elle pour apprendre des points de repère.
« Lorsque la fourmi suiveuse a été conduite par le robot
vers le nouveau nid, nous lui avons permis d’examiner le nouveau nid,
puis, à son rythme, de commencer son voyage de retour. Nous avons ensuite
utilisé le portique pour suivre automatiquement le chemin du retour.
fourmi. »
L’équipe a découvert que le robot avait en effet enseigné
l’itinéraire avec succès à l’apprentie fourmi.
Les fourmis connaissaient le chemin du retour vers l’ancien nid, qu’elles
aient pris un chemin sinueux ou droit.
Le professeur Franks a expliqué: « Un chemin droit pourrait être
plus rapide, mais un chemin sinueux donnerait plus de temps à la fourmi
suivante pour mieux apprendre les points de repère afin qu’elle
puisse retrouver son chemin aussi efficacement que si elle avait été
sur un chemin droit.
« Fondamentalement, nous avons pu comparer les performances des fourmis
que le robot avait enseignées avec celles que nous avons transportées
sur le site du nouveau nid et qui n’avaient pas eu l’occasion d’apprendre
l’itinéraire. Les fourmis apprises ont retrouvé leur chemin
beaucoup plus rapidement. et avec succès. »"
Des robots
en essaim (Trustmyscience
21 octobre 2021).
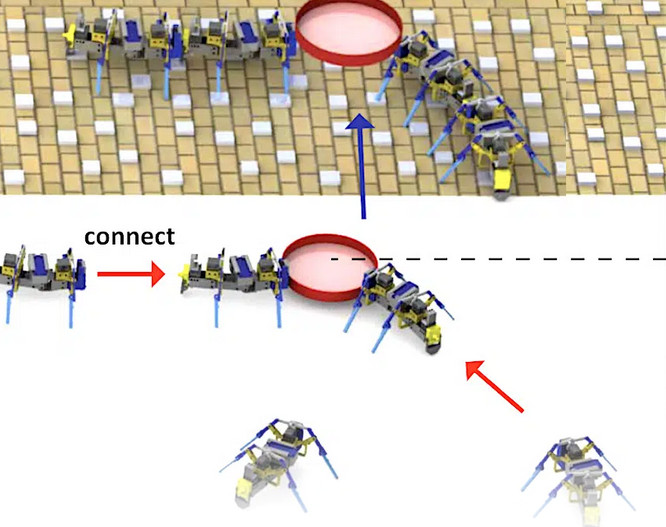
"En s’inspirant des fourmis, la professeure Yasemin Ozkan-Aydin
de l’université de Notre-Dame (États-Unis) et son équipe
ont mis au point un ensemble de robots quadrupèdes imprimés en
3D capables de travailler ensemble pour surmonter ces difficultés. On
appelle cette branche de la robotique la « robotique en essaim ».
Chaque spécimen mesure entre 15 et 20 cm de long et intègre une
batterie au lithium-polymère, un microprocesseur, un capteur de lumière
monté à l’avant ainsi que deux capteurs tactiles magnétiques
— à l’avant et à l’arrière. Les quatre
pattes, très flexibles, permettent de réduire le nombre de capteurs
et de pièces supplémentaires et confèrent aux robots un
niveau d’intelligence mécanique, ce qui les aide à interagir
avec des terrains accidentés ou irréguliers. Les détails
ont été publiés dans la revue Science Robotics. Dans une
expérience visant à tester leur capacité à surmonter
les obstacles en essaim, les chercheurs ont placé des blocs de bois collés
sur des panneaux de particules entre un robot et le point d’arrivée
(l’objectif) puis ont observé comment il se comportait. Confronté
à l’obstacle, le robot a comme prévu transmis un signal
aux autres unités situées à proximité, qui l’ont
aussitôt rejoint. Ainsi,
les robots ont formé un véritable pont qui a permis à l’ensemble
d’atteindre l’objectif. Ils peuvent également se servir de
cette capacité pour transporter des objets trop grands ou trop lourds
pour leur taille et poids."
- Des essaims autonomes de fourmis robots pourraient aider à explorer d'autres planètes selon un chercheur de Californie (Video Fox News Flash 9 juin 2020).
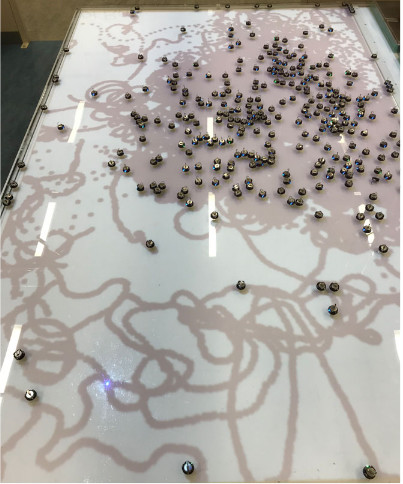
- Polytech à Tours fabrique des petits robots : A propos de Raphaël Boulay : "En première année d'ingénieur (bac+1) on fait fabriquer des robots aux 120 étudiants qui arrivent. Comme cela ils sont initiés à l'électronique, la mécanique et l'informatique. Ils sont même sensibilisés à l'environnement car le robot est construit pour faire des mesures environnementales et pour construire ensuite une carte avec ces données. Potentiellement on fabrique 60 robots tous les ans ! On avait imaginé avec Raphaël utiliser cette grosse colonie pour illustrer des mécanismes de régulation dans lesquels la "personnalité" introduirait de la variabilité de comportement. On n'était pas sûr du pouvoir observer quelque chose mais cela aurait été amusant d'impliquer des étudiants dans ces idées ! (Nicolas Monmarché, mail du 31 janvier 2020). Il faut signaler que des roboticiens de Tours avaient déjà envisagé de faire un robot qui s'inspire des mécanismes d'orientation visuelle des fourmis (Françoise et al 2000).
- Antbot, un robot qui s'oriente sans GPS comme les Cataglyphis du désert. Pour cela, ses créateurs, des chercheurs du CNRS et de l’université d’Aix-Marseille, l’ont doté d’une boussole solaire qui capte la polarisation de la lumière solaire. A cette technique s’ajoute celle de l’observation du défilement du paysage et du comptage des pas. Contrairement aux autres fourmis, celles-ci, qui vivent dans le désert, ne peuvent pas se repérer en utilisant leur odorat, à cause de la chaleur. Elles ont donc développé cette technique de la boussole solaire, très fiable, qui leur permet de retrouver leur nid. AntBot est un bel exemple de biomimétisme, la discipline dans laquelle la science s’inspire de la nature. Cela devrait permettre d’aider d’autres robots autonomes comme les voitures sans chauffeur. Le prix spécial de la recherche des Bouches-du-Rhône a été attribué le 15 février 2021 à Julien Serres, de l'Institut des sciences du mouvement à Marseille, qui travaille sur la navigation autonome et un robot s'appuyant sur le biomimétisme et l'observation des fourmis du désert (Lien).

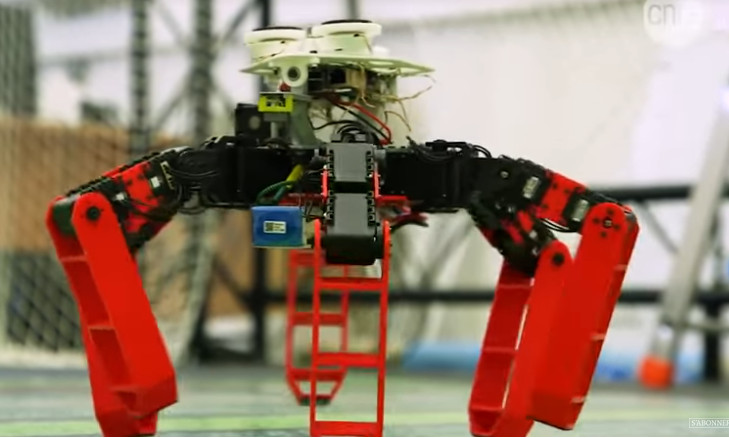

Voir vidéo du Monde et Le Monde du 20 février 2019
- Des
mini-robots qui collaborent avec des fourmis
Des
scientifiques du projet européen CyBioSys ont en effet créé
deux mini-robots (des Mobots) qui ont été introduits puis acceptés
dans la société très organisée des fourmis. Dès
lors qu’une colonie de fourmis se met en marche vers de nouveaux butins
(des débris et de la nourriture le plus souvent), nos deux robots sont
avertis à distance, suivent la petite troupe de fourmis et transportent
ensuite les morceaux les plus gros pour les rapporter à la fourmilière.
Non seulement les fourmis « acceptent » sans effort les deux androïdes,
mais elle finissent même par profiter des capacités de «
portage » des robots afin d’effectuer un plus grand nombre de raids
de nourriture dans une même journée. In fine, les fourmis se comportent
comme si elles « aidaient » les robots à trouver la nourriture,
et les robots à leur tour « aident » les fourmis à
transporter la nourriture; c’est ce que l’on appelle une synergie.
Les chercheurs du projet CyBioSys estiment que ces recherches originales peuvent
impacter les travaux sur l’IA et même le comportement de robots
« exploratoires » lorsque ces derniers se retrouvent dans des environnements
hostiles; s’ils le disent…(Frederic 2017)

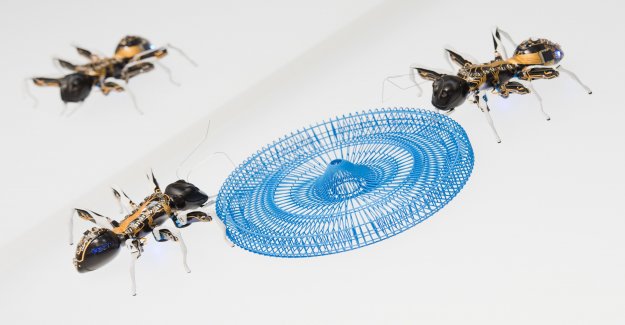
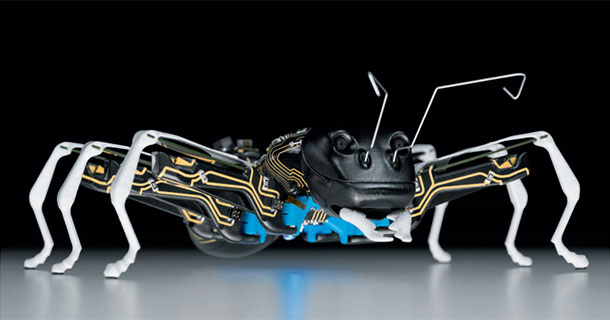
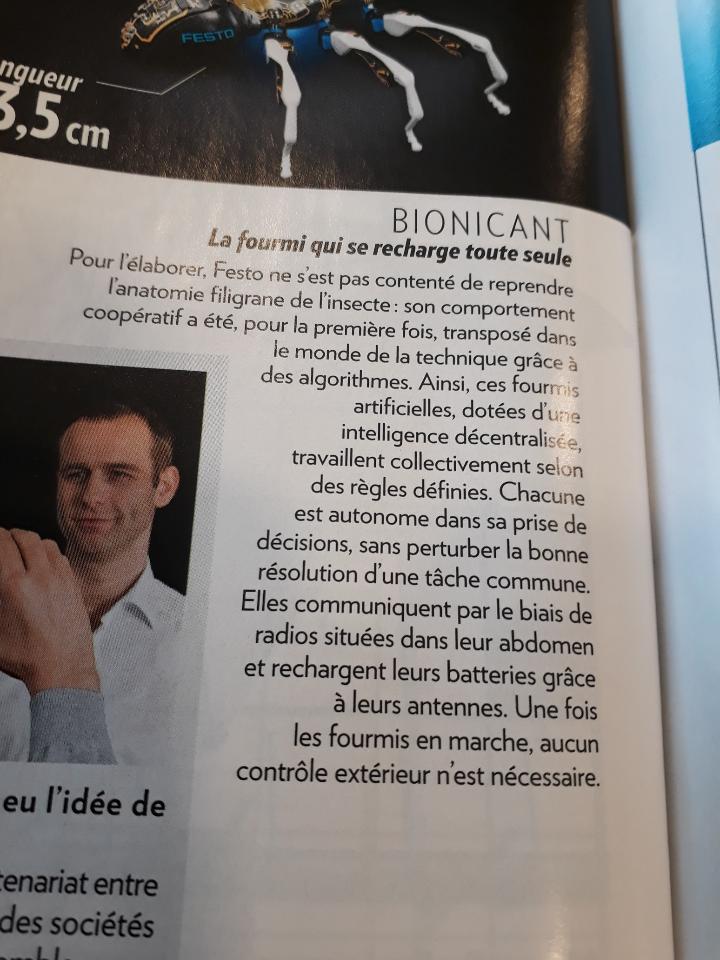
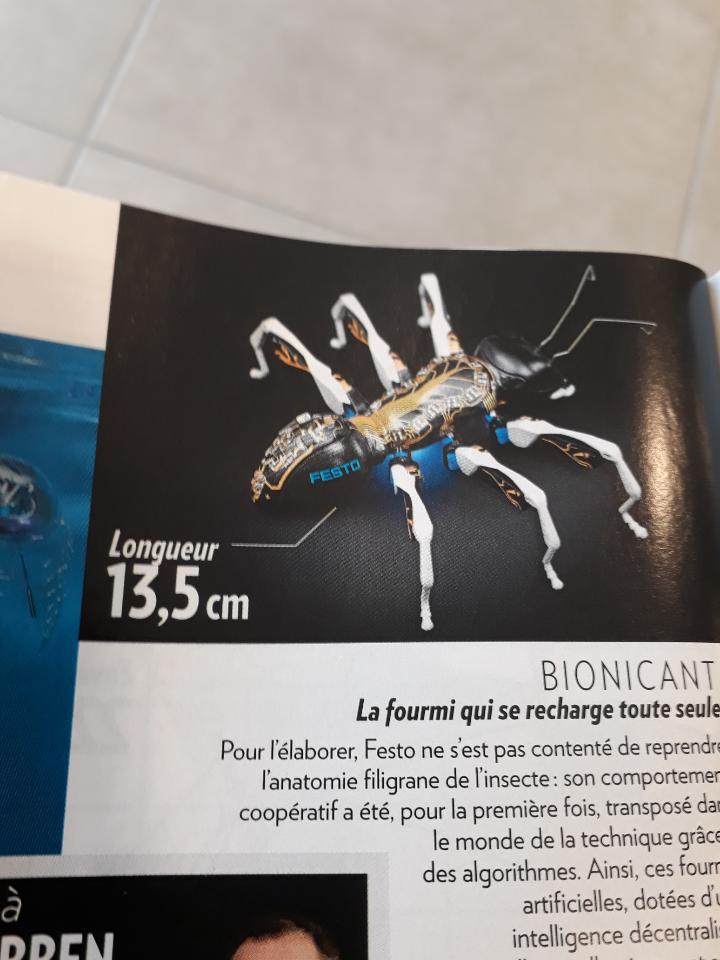
- des fourmis bioniques : Avec ses BionicANTs, Festo a non seulement réussi à reproduire en version robotisée l’anatomie des fourmis mais également leur comportement de coopération grâce à des algorithmes complexes. Telles les formicidés naturels, les BionicANTs de la marque allemande Festo communiquent entre eux et coordonnent leurs actions et déplacements les uns par rapport aux autres. Ces fourmis artificielles démontrent encore une fois comment de simples unités isolées peuvent accomplir des tâches complexes par le simple fait d’une coopération globale intelligente. C’est ce que l’on appelle l’intelligence collective. Grâce à ce comportement d’essaimage, les robots fourmis travaillent ensemble en suivant des règles individuelles simples. L’université de Harvard étudie également ces comportements en coordonnant 1 024 robots entre eux. L’Université de Pennsylvanie a imaginé un système de robots sauveteurs s’assemblant entre eux de manière autonome.
- On vient de comprendre comment les fourmis de feu s'organisent pour construire des tours. Cela permettra peut-être de faire des petits robots autonomes (agissant en essaims) qui grimpent les uns sur les autres pour franchir une marche.
- Un travail présenté à la Société de Biology Intégrative et Comparative par des biologistes et des biomécaniciens part de l'observation que seulement un petit nombre de fourmis de feu creusent les galeries. Ils ont programmé des robots à creuser. Quand peu de robots travaillent le rendement est supérieur de 35%. Cela pourrait expliquer le mystère des fourmis inactives (Pennisi 2016). Voir La fourmi travailleuse
- Un robot-fourmi à Stanford (USA) a réussi à tracter 2 000 fois son poids (Science et Vie 2016). Les chercheurs se sont inspirés des forces qui permettent l'adhésion des pattes des fourmis au sol et du travail en équipe des fourmis qui multiplie la force.
- Grawer et al ont fait un modèle de distribution par trophallaxie de la nourriture dans la colonie avec des agents, modèle qui pourrait servir à des colonies de robots pour échanger de l’énergie (Grawer et al. 2016).
- Cataglyphis avait déjà inspiré les roboticiens qui ont mis au point Sahabot2 : "Miss bombycina, conçue pour la survie en enfer (ça m'Intéresse septembre 2001 - Pdf) avec interview de Rüdiger Wehner (Université de Zurich) par Jean-Pierre Vrignaud.
- Dans un dossier intitulé
« Biomimétisme : Les cinq animaux préférés
des innovateurs », Industrie
& Technologies revient sur le travail collaboratif de la fourmi.
"Ce n'est pas sa petite taille ou sa façon de
se déplacer qui intéresse les chercheurs, mais sa façon
de travailler ! Et de communiquer... Festo s’est inspiré à
la fois des caractéristiques physiques de la fourmi comme de sa manière
de travailler en collaboration pour développer ses robots. C’est
notamment le cas de Bionicants, des fourmis de 13,5 centimètres de long
imprimées en 3D. Equipées de capteurs optiques, elles peuvent
s’orienter dans l’espace, mais également travailler en collaboration
et de manière autonome. Toujours dans le collaboratif, des chercheurs
de l’université de Californie ont mis au point des prototypes de
robots capables de s’épauler pour surmonter un obstacle. Ces concepts
ressemblent également à leurs homologues vivants mais se basent
surtout sur des algorithmes pour la collaboration."
- Une fourmi géante existe aussi à Nantes dans la galerie des machines

- Les robots tondeuses existent
depuis longtemps : 
Emmanuelle Pouydebat (2019 présente une revue sur le biomimétisme et tous les projets qui foisonnent en ce moment. Par exemple le robot-abeille Bee-Rotor (p.22-23).
Un robot, origine ? années
1980 : 
Polo
robot fourmi.
Loaëc, R. (1988). Quand la Polo devient Fourmi. Chasseur d'images 99, 2
pages. Pdf
Voir
- Bonabeau, E. and G. Théraulaz (2000). Swarm smarts. Scientific american.
March 2000. 54-61.
- Bonabeau, E. and G. Théraulaz (2000). L'intelligence en essaim. Pour
la Science. 271. 66-73. Pdf
- Françoise, L., N. Monmarché and G. Venturini (2000). Vers un
robot modélisant la perception visuelle des fourmis. Actes Coll. Insect.
Soc. 13: 16-172. Pdf
- Franks,
N. R., J. A. Podesta, E. C. Jarvis, A. Worley and A. B. Sendova-Franks (2022).
Robotic communication with ants. Journal of Experimental Biology 225(15). doi:
10.1242/jeb.244106
- Frederic,
L. (2017) Des chercheurs européens inventent des mini-robots capables
de collaborer avec des fourmis. http://kulturegeek.fr, 5 octobre 2017, p. http://kulturegeek.fr/news-122593/chercheurs-europeens-inventent-mini-robots-capables-collaborer-fourmis
- Grawer, J., H. Ronellentsch, M. G. Mazza and E. Katifori (2016). A trophallaxis
inspired model for distributed transport between randomly interacting agents.
physics.bio-ph 20 Jul 2016, arXiv:1607.06055v1.
- Hunt, E. R., S. Jones and S. Hauert (2019). Testing the limits ofpheromone
stigmergy inhigh-density robot swarms. Royal Society Open Science 6: 190225.
http://dx.doi.org/10.1098/rsos.190225
- Larousserie, D. (2019). Reproductibilité : l'IA n'échappe pas
à la crise. Le Monde Science & Médecine 27 février
2019.
- Michelsen, A. (1998). Danse techno chez les abeilles. La Recherche N°
310, juin: p. 52-56. Voir article
- Passera, L. and A. Wild (2016). Formidables fourmis, Quae. 160p. voir Les
fourmis et la robotique
- Pennisi, E. (2016) Fire ants slack off to avoid traffic jams. science.org,
5 January 2016, p. DOI: 10.1126/science.aae0176.
- Pouydebat, E. (2019). Quand les animaux et les végétaux nous
inspirent, Odile Jacob. 202p.
- Science et Vie (2016). Il réussit à tracter jusqu'à 2000
fois son poids. Science & Vie Juin 2016: p. 62-63. Pdf
{kind=link}